
Industry
Mẹo tìm kiếm:

Các điểm chính được AI trích xuất từ bài viết
AutoNavi, một công ty thuộc tập đoàn Alibaba, đã ra mắt dòng mô hình nền tảng thể hiện ABot với hai phiên bản: ABot-M0 và ABot-N0. ABot-M0 được thiết kế cho thao tác robot, trong khi ABot-N0 dành cho điều...
AutoNavi đã xây dựng một hệ thống dữ liệu điều hướng với gần 8.000 cảnh 3D độ phân giải cao và khoảng 17 triệu lần trình diễn của chuyên gia. Nhờ đó, ABot-N0 đã thiết lập nhiều kỷ lục mới...
ABot-N0 là mô hình điều hướng nền tảng đầu tiên dựa trên VLA (Vision-Language Action), cho phép hợp nhất năm nhiệm vụ điều hướng cốt lõi như điều hướng điểm tới điểm, điều hướng đối tượng, theo dõi hướng dẫn,...
ABot-M0 là mô hình nền tảng đầu tiên trên thế giới dành cho thao tác robot với kiến trúc thống nhất. Mô hình này chuẩn hóa hệ tọa độ, tần số điều khiển và mô hình chuyển động gia tăng,...
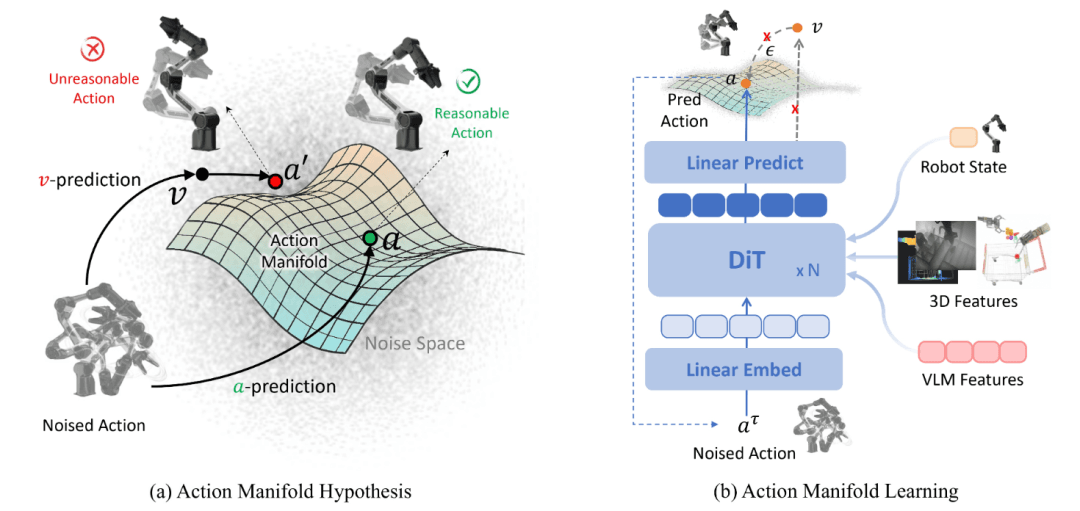
Nhóm phát triển của AutoNavi đã áp dụng phương pháp Học Đa Tác Vụ (AML) cùng với mô-đun nhận thức 3D để cải thiện khả năng hiểu biết không gian và ngữ nghĩa của mô hình. Nhờ đó, ABot-M0 đã...
Ngày 12 tháng 2, AutoNavi, công ty thuộc tập đoàn Alibaba, đã công bố dòng mô hình nền tảng thể hiện ABot với hai phiên bản chính: ABot-M0 dành cho thao tác robot và ABot-N0 dành cho điều hướng. Cả hai đều đạt các kết quả xuất sắc, dẫn đầu 10 bảng xếp hạng hàng đầu toàn cầu.
ABot-M0 được xem là mô hình nền tảng kiến trúc thống nhất đầu tiên trên thế giới dành cho thao tác robot. Mô hình chuẩn hóa hệ tọa độ, tần số điều khiển và mô hình chuyển động gia tăng, giúp tích hợp dữ liệu quỹ đạo từ các nền tảng khác nhau.
Dữ liệu đào tạo của ABot-M0 được xây dựng hoàn toàn từ nguồn công khai, bao gồm hơn 9.500 giờ dữ liệu, 6 triệu quỹ đạo và dữ liệu trên hơn 20 dạng thể hiện khác nhau.

Nhóm phát triển đã áp dụng phương pháp Học Đa Tác Vụ (Action Manifold Learning - AML) cùng việc tích hợp mô-đun nhận thức 3D nhằm nâng cao hiểu biết không gian và ngữ nghĩa.
Trên bảng xếp hạng Libero-Plus, ABot-M0 đạt tỉ lệ thành công 80,5%, cao hơn gần 30 điểm phần trăm so với phương pháp xếp hạng hàng đầu trước đó.
ABot-N0 là mô hình nền tảng điều hướng đầu tiên dựa trên VLA (Vision-Language Action) cho phép hợp nhất năm nhiệm vụ điều hướng cốt lõi:
Mô hình áp dụng kiến trúc "não–hành động" phân tầng, trong đó:
AutoNavi đã xây dựng hệ thống dữ liệu điều hướng với gần 8.000 cảnh 3D độ phân giải cao cùng khoảng 17 triệu lần trình diễn của chuyên gia.
Mô hình thiết lập nhiều kỷ lục mới trên 7 bảng đánh giá chính, bao gồm CityWalker, SocNav, R2R-CE/RxR-CE và HM3D-OVON.
Tại mô phỏng vòng lặp đóng SocNav, tỉ lệ thành công tăng 40,5%. Trong khi đó, tỉ lệ thành công điều hướng đối tượng trên HM3D-OVON cải thiện 8,8%.
Đáng chú ý, AutoNavi cho biết ABot-N0 đã được triển khai trên các robot bốn chân thực tế, đạt hiệu quả trong suy luận thiết bị biên và kiểm soát vòng lặp đóng.
Nguồn: Minds in AI
Bài viết hay? Ấn để tương tác


Bình luận (0)
Hãy là người đầu tiên bình luận trong bài
Đăng nhập Đăng nhập để bình luận trong bài viết này